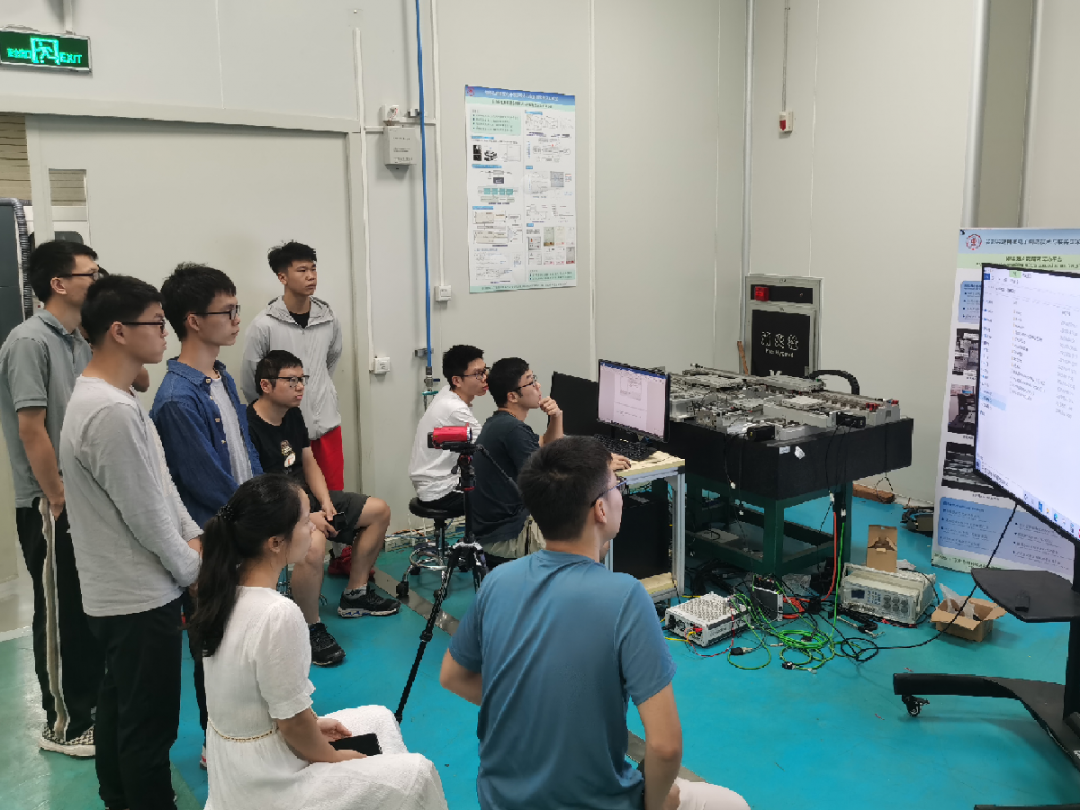
10月29日,华道超精和广东工业大学高速精密运动创新团队在工学2号馆108实验室顺利举行dSPACE系统和CK3M控制器的基础用法培训课程。课程由黄瑞锐和彭皓主讲,主要内容为针对ADRC控制算法的dSPACE系统和CK3M控制器应用,包括:软硬件的开发和使用、运动控制设备的基础知识和相关算法等。经过一天的课程学习培训,现场讨论气氛热烈,相信能帮助团队成员们在未来的研究工作中能更好地发挥自身能力!
控制系统的首要目的是使系统稳定运行,不受非期望因素的影响,或者受到影响后能及时加以纠正,使系统保持在期望的状态。然而,干扰和不确定性广泛存在于控制对象和控制系统中。干扰主要表现为外在的非期望因素,会通过多种渠道进入系统,而系统内部的不确定因素更是无法剔除。这些因素会使系统性能受到影响,严重情况下甚至使系统不稳定。例如:一个亚微米和纳米级别的高精密运动平台,它在运动过程中所收到的摩擦力作为一个非线性扰动,会极大的影响平台的定位精度。
在工业控制问题引起物理学家与数学家的关注之后,各种数学方法被用于研究控制问题,开启了控制理论的研究进程。然而,在大部分控制理论提出的控制系统设计标准方法(如根轨迹法,极点配置,状态反馈,反馈线性化、Lyapunov法等)中并没有考虑扰动的影响。这些方法应用的前提是已知被控对象的数学模型和闭环系统的动态要求,这样反馈控制的设计和分析就转化为一个单纯的数学问题;并且不同物理特性的系统可以建立相似的数学模型,因此可以作为一类数学问题来研究,充分利用现有的数学工具推导,建立严谨的控制理论。
华道超精采用的ADRC控制算法源自中华民族的伟大智慧--指南车。指南车是我国古代的一项伟大发明,被称为世界上第一个自动控制系统。它采用巧妙的齿轮传动,根据左、右轮速之差,得到车向变化的信息﹐并通过相应的补偿,使战车上的木头仙人能够“手常南指”。其车厢内部设置有一套可自动离合的齿轮传动机构,工作原理如下:当车子行进中偏离正南方向,向左转弯时,车辕前端向左移动,车辕后端向右移动,则将右侧传动齿轮放落,使车轮的转动能带动木人下方的大齿轮向右转动,恰好抵消车辆向左转弯的影响,使木人手臂仍指南方;当车子向右转弯时,左侧的传动齿轮放落,使大齿轮向左转动,以抵消车子右转的影响;当车子向正前方行进时,车轮与齿轮系是分离的,因此木人手臂所指的方向不受车轮转动的影响。如此一来,不管车子的运动方向是东,西,南、北,还是不断变化,车上木人的手臂总是指向南方。如此高明的一套控制系统,通过巧妙的传感器和执行装置来实施准确控制,过去曾一度被人们认为是开环控制,原因在于对反馈的狭义理解。
指南车的齿轮系统分为两部分:传感器和执行机构。需要注意的是,这里传感器测量的不是被控量(木人指向,不可测),而是影响被控量的扰动(车向的变化,可测)。抗扰是通过执行机构,根据车向的变化,使木人反转,从而保持“手常南指”。因此,指南车的工作原理也可称为抗扰原理,即根据造成被控量偏移的扰动,而不是被控量本身,构造控制量,抵消扰动的影响,使被控量不偏移。不言而喻,指南车所代表的是广义的反馈,有重大意义,而其所体现的抗扰思想,更具有深远的影响。
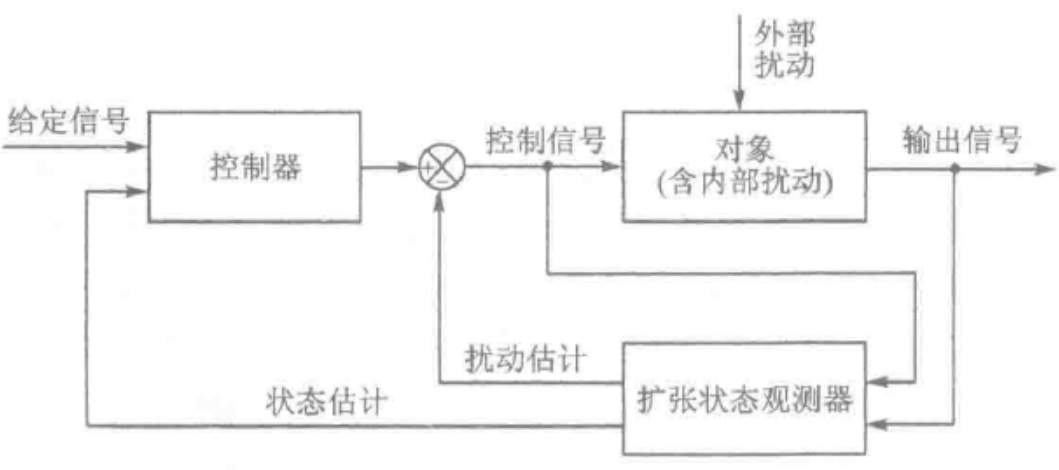
自抗扰控制(ADRC)技术是韩京清研究员对经典调节理论与现代控制理论两方面的内在思想不断进行深入思考的过程中,借鉴现代控制理论在分析系统结构性质方面的成果,在经典控制论思想精华的基础上逐步构建,并于1999年正式系统地提出来的。其核心思想是以简单的积分串联型为标准型,把系统动态中不同于标准型的部分(包括系统的不确定性以及扰动)视为总扰动(包括内扰和外扰),以扩张状态观测器为手段,实时地对总扰动进行估计,并加以消除,从而把充满扰动,不确定性和非线性的被控对象还原为标准的积分串联型,使得控制系统的设计从复杂到简单,从抽象到直观。
ADRC基本框架
韩老师构建的是非线性ADRC通用控制器,已有文献表明这种通用非线性ADRC经过针对具体对象的选择、参数调整成为专用ADRC后具有很好的抗扰效果。美国克利夫兰州立大学的高志强博士应用频率尺度的概念,将ADRC线性化,提出了通用的线性 ADRC 控制器结构,并将其调整参数与带宽相联系﹐使ADRC参数概念更直观,整定更简单,大大促进了ADRC的推广。
在韩京清,高志强两位老师所取得的通用ADRC成果的引领下,诸多研究者纷纷加人到 ADRC稳定性﹑鲁棒性等性能分析以及专用ADRC 的应用研究中,并取得了丰硕的成果。